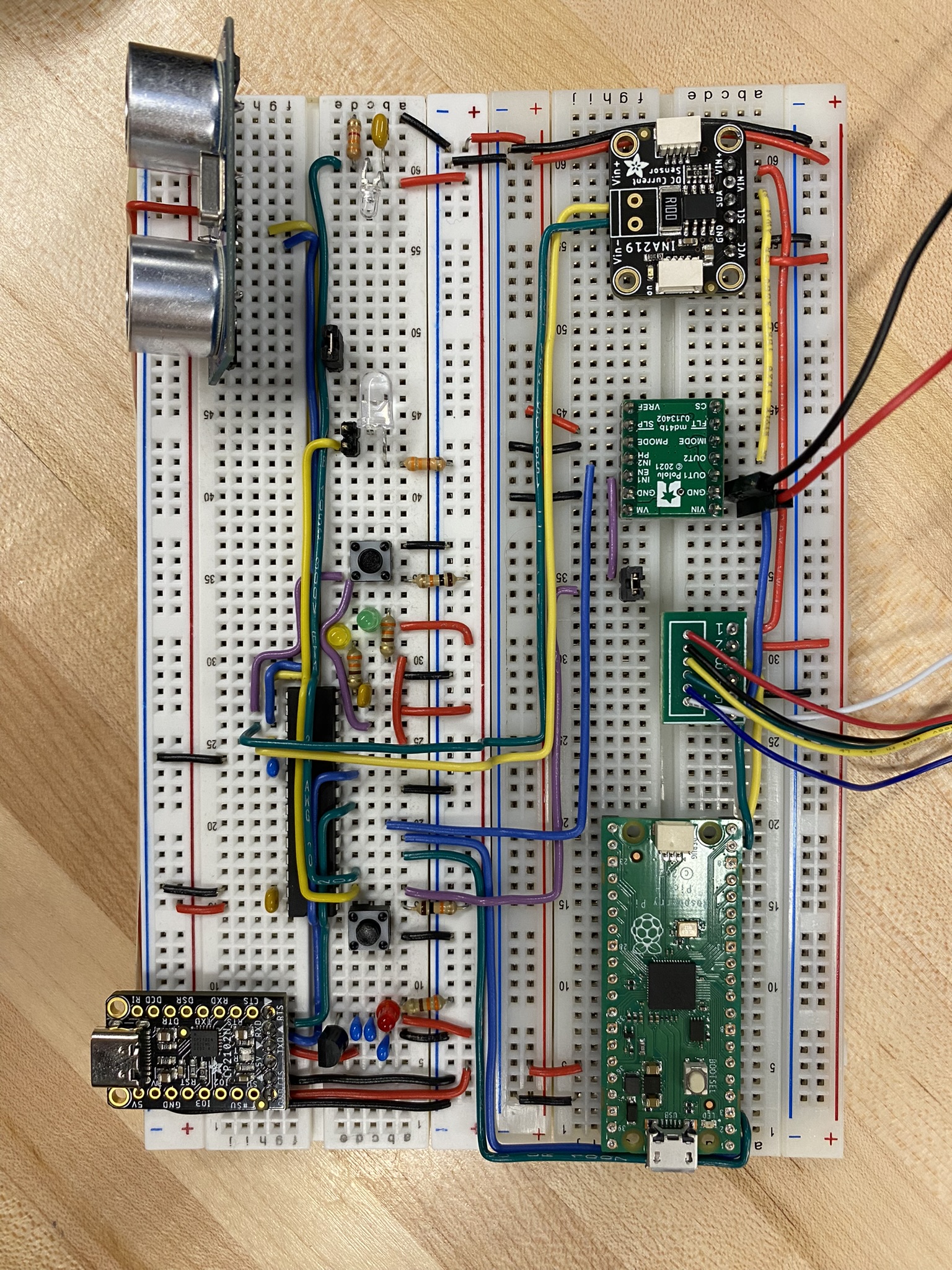
Low level microcontroller from scratch (PIC32-DIP)
Designed and built a microcontroller development board from scratch using a PIC32MX170F256B from Microchip, with a PID motor control interace.
CMicrocontroller board designLow level motor controlPIDCircuit design